Статья из журнала Проблемы машиностроения и автоматизации, № 3/2004 "Об экспериментальном подтверждении возможности создания прототипа реактивного двигателя без выброса вещества".
В статье на основе экспериментальных данных обосновывается принципиальная возможность создания двигателя работающего без выброса массы. Хотя это противоречит классическим представлениям о Ньютоновой физике ("нельзя вытянуть себя за волосы"), тем не менее авторы статьи аргументированно доказывают что нечто подобное вполне возможно.
Содержание не изменено. Оригинальный скан статьи. [2,6 Мб zip]
ПРОБЛЕМЫ МАШИНОСТРОЕНИЯ И АВТОМАТИЗАЦИИ. № 3 2004
С.Д. Иванов, Г.Н. Чернышев
ОБ ЭКСПЕРИМЕНТАЛЬНОМ ПОДТВЕРЖДЕНИИ ВОЗМОЖНОСТИ СОЗДАНИЯ ПРОТОТИПА РЕАКТИВНОГО ДВИГАТЕЛЯ БЕЗ ВЫБРОСА ВЕЩЕСТВА
Рассматривается проблема создания движущей силы на летающем объекте, каковым может быть самолет, ракета, космический аппарат и т.д., без выбрасывания из него массы, например, газа, как это имеет место при работе современного реактивного двигателя. Теоретически возможности создания такого двигателя показаны в работах многих известных ученых и авторов данной публикации. Конечно, одних теоретических доводов недостаточно. Требуются экспериментальные подтверждения работоспособности предлагаемой простейшей модели двигателя, что и проделано в предлагаемой работе.
Проблема имеет положительное решение и полностью основана на классическом законе сохранения энергии. Возможность создания движущей силы без выбрасывания массы появилась как следствие положения, что космическое пространство не вакуум, а заполнено некоторой упругой средой, рассмотренной в работах известных ученых в области физики [2,3] и развитой в работе [4] с точки зрения специалиста в области теории упругости. Эта среда, как показано в работе [4], по своим упругим свойствам не является ни твердым телом, ни жидкостью, ни газом, а представляет собой особую среду, не имеющую пока земного аналога. Однако по своим свойствам она позволяет проводить исследования по вопросу взаимодействия с ней с целью нахождения способов перемещения в ней, т.е. в пространстве аналогично тому, как это делается, например, в воде, в воздухе при перемещении подводных кораблей, морских животных, самолетов, птиц и так далее. Конечно, одних теоретических доводов недостаточно. Требуются экспериментальные подтверждения работоспособности предлагаемой простейшей модели двигателя, что и проделано в предлагаемой работе.
Чтобы была понятна постановка и результаты экспериментальных исследований, нужно привести некоторые теоретические результаты, полученные в работе [1]. Перемещающийся в пространстве объект схематично рассмотрен в следующем виде. В носовой части объекта расположен механизм типа реактивного двигателя, который выбрасывает массу для создания движущей реактивной силы, а затем эта выброшенная масса вновь соединяется с объектом в хвостовой части его при помощи некоторого приспособления. Здесь при проведении теоретических рассуждений считается, что выбрасываемая масса является твердым телом. После отделения массы от двигателя, а также и от объекта тоже, она фактически стала независимым от объекта телом в пространстве. Кинетическая энергия выброшенной реактивным двигателем массы больше, как далее будет видно, кинетической энергии объекта, сообщенной ему этой массой. Цель настоящего исследования и состоит в использовании этого превышения энергии выброшенной массы для ее возвращения на объект и для создания нужного движения объекту.
Два рассматриваемых этапа движения объекта и выбрасываемой массы — выбрасывание и возвращение, можно рассматривать независимо друг от друга. Первый этап представляет собой известный процесс реактивного двигателя, который, реально выбрасывает не твердое тело, а газ. Этот этап хорошо исследован. Здесь серьезное внимание уделяется второму этапу — процессу соединения выброшенной массы и объекта, т. е. процессу сохранения выбрасываемой массы на объекте.
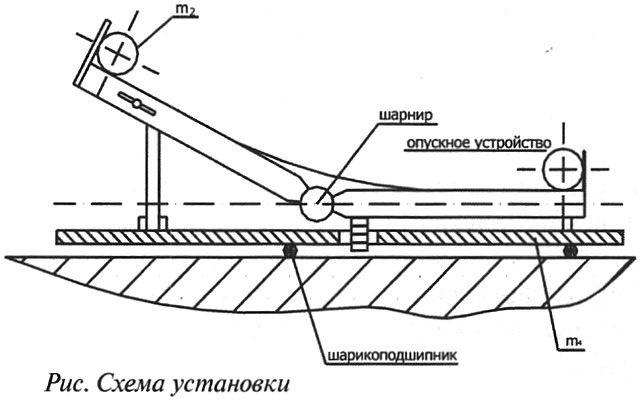
Пусть масса объекта m1, а масса, выброшенная из двигателя со скоростью v2, и сохраненная затем при помощи некоторого контактного взаимодействия с объектом, m2 (см. рисунок).
Контактным взаимодействием могут быть удары, которые в данном анализе считаются центральными. Разберем в начале два варианта ударов [5]: 1) удар в хвостовую часть упругий и 2) удар в хвостовую часть полностью неупругий, понимая под таким ударом вариант, когда тела входят в контакт друг с другом и далее уже не разъединяются. В результате выброса массы m2 со скоростью v2 из носовой части объекта, последний, в случае, если он не двигался, приобретает скорость v1, которая определяется из условия сохранения общего для обеих масс импульса нулевым:
m1v1+m2v2=0.
Откуда следует:
v1=-m2m1-1v2.
Положительным направлением будем считать направление скорости 2. Когда два тела с массами m1, m2, двигающимися со скоростями v1, v2 вдоль прямой, соединяющей центры тяжести данных тел, ударяются друг с другом и удар центральный, то скорости этих тел u1, u2 после соударения равны [5]:
u1=[(m1-km2)v1+m2(1+k)v2](m1+m2)-1
u1=[m1(1+k)v1+(m2-km1)v2](m1+m2)-1
k=(u2-u1)(v1-v2)-1
В случае упругого удара так называемый коэффициент восстановления k равен k=1, в случае неупругого удара k=0. Когда удары не вполне упругие, коэффициент восстановления принимает промежуточные значения 1>k>0.
В случае упругого удара (k=1) выброшенной массы m2 летящей со скоростью v2, в хвостовую часть объекта, масса которого m1 скорость его становится равной u1=m2m1-1v2 и в результате упругого удара с выброшенной массой объект останавливается. Скорость массы m2 после упругого удара в хвостовую часть объекта становится равной u2=-v2. Процесс движения масс после упругого удара повторяет первоначальные их движение до удара, но только в противоположных направлениях. Энергия движения масс сохраняется.
В случае неупругого удара, k=0, для скоростей u1, u2 масс m1, m2 имеем u1=u2=0. Это означает, что после неупругого удара выброшенной двигателем массы m2 в хвостовую часть объекта, последний вместе с этой массой останавливается. Энергия движения масс m1, m2 расходуется на происшедшие во время удара какие-то неупругие деформационные процессы. Израсходованная на неупругие процессы энергия ΔW определяется формулой [5]:
ΔW=0,5m1m2(m1+m2)-1(v1-v2)2(1-k2).
Из нее следует, что при упругом ударе, k=1, расход энергии равен нулю, при неупругом ударе, k=0, расход энергии максимальный.
При соударении двух тел контактные напряжения, как правило, являются очень большими и приводят к неупругим деформациям. Одной из возможностей уменьшения контактных напряжений и расхода энергии на неупругие деформации может служить увеличение времени контакта.
Кинетическая энергия W2 движения выброшенной массы m2 равна:
W2=0,5m2v22.
Энергия W1 движения массы объекта m1, сообщенная ему выбрасыванием массы m2, равна:
W1=0,5m1v12=0,5m1-1m22v22, v1=-m2m1-1v2. (1)
Для разности энергий W2 W1 имеем:
W2-W1=0,5m2(1-m2m1-1)v22. (2)
В случае, когда масса m2, меньше массы m1 эта разность энергий положительная, что и свидетельствует о том, что энергия выбрасываемой реактивным двигателем массы больше энергии объекта, сообщаемой ему этим же реактивным двигателем выбрасыванием массы m2. Учитывая, что выбрасываемая реактивным двигателем в конкретный момент его работы масса m2 всегда много меньше массы объекта m1, вторым членом в круглых скобках иногда можно пренебречь.
Можно использовать это превышение энергии массы m2 для сообщения нужного движения объединенной массе (m1+m2). Рассмотрим следствия соударения масс m1, m2 с последующим их соединением, когда энергия массы m2 расходуется на энергию движения соединенной массы (m1+m2), сообщая ей некоторую скорость u1 которая определяется следующим образом. До соударения массы m1, m2 движутся навстречу друг другу, поэтому часть энергии массы m2 израсходуется на остановку массы m1, а оставшаяся часть энергии расходуется на сообщение движения объединенной массе (m1+m2). Запишем выражение для энергии, объединенной массы:
0,5(m1+m2)u12=0,5m2v22-0,5m1v12, v1=-m2m1-1v2.
Отсюда находится скорость u1 объединенной массы после соударения:
u1=(m2m1-1)1/2[(m1-m2)(m1+m2)-1]1/2v2. (3)
Видно, что, когда масса m2 меньше массы m1, что, как было сказано, вполне естественно для реактивных двигателей, скорость объединенной массы является вполне разумной величиной по сравнению со скоростью v1=-m2m1-1v2, сообщаемой массе m1 реактивным двигателем. Если масса m2 много меньше массы m1 что также вполне естественно, скорость u1, которую можно сообщить объекту, передавая ему энергию выбрасываемой и затем сохраняемой на объекте массы, может оказаться много больше скорости v1, сообщаемой объекту реактивным двигателем выбрасыванием массы без ее сохранения. В этом случае имеем (m2m1-1) много меньше единицы и тогда:
u1≈(m2m1-1)1/2v2.
Сравнивая скорость u1 со скоростью v1=m2m1-1v2 и учитывая, что (m2m1-1)1/2>(m2m1-1), получаем u1>v1. Это подтверждает вышесказанное. Получается и следующий результат: скорость u1 соединенной при данном ударе массы (m1+m2) направлена в противоположную сторону по сравнению со скоростью v1.
Возможности выброшенной реактивным двигателем массы неплохо демонстрирует рассмотренный выше пример упругого соударения выброшенной массы m2 и массы объекта m1. Энергии массы m2 хватило остановить объект, сообщить ему скорость v1, но уже в противоположном направлении по сравнению с первоначальным направлением, сообщенным объекту реактивным двигателем, это находится в соответствии с только что полученным результатом. Правда, масса m2, в этом случае не сохранилась на объекте, но возможности ее по организации движения довольно хорошо просматриваются и их можно и нужно развивать.
Как видно из изложенного, структура контактного взаимодействия соударяющихся тел существенно влияет на их движение после окончания контактного процесса. Это обстоятельство и используется в предлагаемом исследовании для нахождения возможности создания движущей силы без потери массы движущегося объекта.
В работе [1] рассмотрено несколько вариантов устройства для приема и сохранения на объекте выбрасываемой реактивным двигателем массы. Первая схема приемного устройства для выброшенной реактивным двигателем массы m2 рассмотрена в форме двух трубочек, которые достаточно легко можно себе представить. Данные трубочки жестко соединены с объектом, т.е. с массой m1 и являются ее частью. Центральные оси трубочек расположены в одной плоскости и симметричны относительно прямой, соединяющей центры тяжестей масс или, что то же, прямой движения центров тяжестей масс m1, m2. Формы центральных осей трубочек похожи на синусоидальные линии и представляют собой участки с круговыми боковыми частями, соединенными прямыми участками по касательным с круговыми участками.
Шарики m2, по касательной влетают в кругообразные начальные участки этих трубочек и затем катятся без трения по трубочкам, отражаясь на круговых участках от двух боковых границ. На протяжении всего движения по трубочкам шарики оказывают давление на противоположные относительно реактивного двигателя поверхности трубочек и передают энергию движения массы m2 массе m1. Размеры трубочек должны определяться из условия, чтобы контактное давление шариков на поверхности трубочек не превышало критическое, больше которого начинают происходить неупругие процессы.
Наклоны прямых участков относительно прямой движения центров тяжести масс m1, m2 регламентируются величиной контактного давления шариков m2 на трубочки. На начальном участке углы касательных к линиям движения центров шариков с прямой движения центров масс m1, m2 желательно создавать более острыми, а с удалением эти углы можно увеличивать. Продольный размер трубочек определяется требованием, чтобы проекция скорости движения шариков на прямую, по которой создается движение масс, стала близкой к нулю относительно массы m1 в конечной части трубочек. Вместе с этой составляющей близкой к нулю будет и вся скорость движения шариков. В результате соответствующая часть кинетической энергии движения массы m2 передастся массе m1, массы соединятся, а скорость соединенной массы (m1+m2) будет определяться формулой (3). Главная цель данного предложения — сохранение выбрасываемой массы m2 на объекте, здесь достигается.
Рассмотрена другая схема приемного устройства для шариков m2. Вместо плоскостных трубочек приемного устройства можно использовать спиральные трубочки. Описание функционального действия таких спиральных трубочек подобно только что сделанному описанию действия плоскостных трубочек, поэтому излишние подробности здесь опустим, перенося изложенное выше к данной схеме. Для избежания появления при ударе паразитных боковых движений системы масс и, соответственно, потерь энергии предлагается использовать четыре трубочки, симметрично расположенные относительно плоскостей, ортогональных друг к другу и пересекающихся по прямой движения центров тяжести масс m1, m2.
Шарики по круговым начальным участкам трубочек влетают в данные трубопроводы и начинают свое движение по трубочкам. Угол наклона касательных к линиям движения центров шариков с прямой движения центров тяжестей масс m1, m2 как и в предыдущем случае, более острый в начале движения и увеличивается с удалением шариков от начального участка трассы. Шарики m2 оказывают контактное давление на поверхности трубочек, которое имеет постоянно проекцию на прямую, по которой создается движение объекта. Трубочки жестко связаны с массой объекта и не могут перемещаться в боковом направлении относительно указанной прямой. Проекция контактного усилия на данную прямую обеспечивает передачу соответствующей части энергии движения массы m2 массе объекта. Движение по трубочкам массы m2 под действием силы сопротивления со стороны трубочек, т. е. со стороны массы m1 продолжается до тех пор, пока скорость массы m2 не сравняется со скоростью массы объекта m1.
Рассмотренные две схемы приемных устройств для возврата выброшенной двигателем массы m2 позволяют увеличить время контактного взаимодействия масс m1, m до необходимой величины. Они не приводят теоретически к расходованию кинетической энергии массы m2 на какие-либо неупругие процессы, а ее энергия передается массе m1, приводя ее в движение. Можно продолжать приводить другие схемы приемных устройств, обеспечивающих сохранение выбрасываемой реактивным двигателем массы и передаче ее объекту, подобные схемы существуют.
Например, можно предложить двигающуюся в объекте по заданному закону относительно него ловушку для приема выброшенной массы m2. Она может представлять собой такое приемное устройство, закон движения которого осуществляется механизмами, установленными на объекте. В момент соприкосновения массы m2 с ловушкой скорость последней можно сделать равной скорости массы m2 или немного меньше. Далее после касания с массой m2 скорость ловушки должна уменьшаться и в конце движения должна обратиться в нуль относительно скорости объекта, что означает соединение масс m1, m2. Обеспечение конкретного закона движения такого приемного приспособления осуществляется, как было сказано, только механизмами на объекте, масса m2 на закон движения не должна влиять. Эта задача выполнимая, сложных законов движения ловушки, по-видимому, нет смысла задавать.
Масса m2, соединившись с ловушкой и двигаясь без потери контакта вместе с ней, приуменьшении скорости ловушки осуществляет силовое воздействие на ловушку, это воздействие не изменяет закона движения ловушки относительно объекта, а передается на объект, движение которого под действием этого силового воздействия изменяется. Силовое воздействие массы и ловушки друг на друга должно быть таковым, чтобы не возникали неупругие деформации в зоне контакта.
При таком движении масса m2 не должна расходовать свою энергию на какие-либо неупругие процессы, а должна передавать ее массе m1, т.е. объекту. Таким образом, объект приводится в движение выброшенной реактивным двигателем массой m2. Скорость движения объекта и направление ее в работе [1] получены.
Получаемый при помощи предлагаемых схем двигателя результат не соответствует законам классической механики. Действительно, если смотреть со стороны на данный летающий объект, то получается следующая картина. Объект не выбрасывает никакого газа, вещества, к нему не прикладывается никакое внешнее силовое воздействие, а он начинает двигаться. По законам механики такого явления не может быть. Хотя следует отметить, что проводимый здесь анализ предлагаемых схем двигателя выполняется, практически, на основе методов классической механики. За основу взят закон сохранения энергии, в отличие от классики, когда за основу взят закон сохранения количества движения. Первый закон ничем не менее известен, чем второй. Далее будут приведены аргументы в обоснование того факта, что и второй закон сохранения количества движения здесь также не нарушается, но появляются нормальные причины, которые приводят к вполне законному изменению количества движения объекта.
Объяснением такому результату служит то, что упругая модель гравитационного пространства расширяет возможности классической теории механики, позволяет шире смотреть на ее законы. Согласно этой модели гравитационное пространство заполнено средой, правда, особой, не имеющей аналога среди земных сред: это не твердое тело, не жидкость, не газ [4]. Но как показали теоретические результаты, эта среда обладает массой с очень большой плотностью, модулями упругости, большой жесткостью на сдвиг и т.д. С такой средой, возможно, найти способы силового взаимодействия. Предлагаемый вариант схемы двигателя основан на силовом взаимодействии летающего объекта со средой гравитационного пространства. Наличие этой упругой среды не является изобретением авторов. Упругое моделирование среды пространства позволило Максвеллу получить уравнения электродинамики, что оказалось очень полезно для человечества. Поэтому отказываться от такого моделирования, если оно позволяет получать полезные людям результаты, вряд ли целесообразно.
В предлагаемой схеме двигателя предусматриваются варианты соударения масс m1, m2, когда на второй стадии работы двигателя в процессе соединения масс потеря энергии движения этих масс на какие-либо неупругие деформации не допускается. Если проследить за импульсом, то общий импульс масс до удара равен нулю, а после растянутого по времени удара импульс объединенной массы отличен от нуля. Получается, как будто, что закон сохранения импульса нарушен. На самом деле все происходит вполне законно. В процессе совместного движения масс до выравнивания их скоростей масса m2 осуществляет по причине торможения и уменьшения скорости движения силовое давление на массу m1 в течение растянутого по времени контакта масс и в результате передает ей кинетическую энергию, передает массе m2 движение, т.е. импульс и, в итоге, движение получает объединенная масса (m1+m2). Требовать сохранения неизменным импульса у системы масс (m1+m2) по указанной причине не нужно, он не сохраняется неизменным из-за наличия указанного потока энергии. Конечно, это положение требует очень серьезного обоснования, что намечено сделать в дальнейшем. Научная работа большая и не на одну статью. Здесь же обосновывается практическая значимость идеи, приводится экспериментальное обоснование ее, т.е. обоснование возможности создания двигателя без потери объектом материи.
С целью подтверждения правильности, правдоподобности исследований по поиску механизма движущей силы без выброса вещества были проведены соответствующие экспериментальные исследования, результаты которых здесь представлены. Конечно, такого рода экспериментальные исследования лучше всего проводить в невесомости, в пространстве, где отсутствует сила тяжести, например, в космосе. Тогда эксперименты будут не очень сложные. Авторы пока только мечтают о такой возможности. В земных условиях, как оказалось, эксперименты достаточно сложные и дорогие, провести их, когда они полностью соответствуют изложенным выше теоретическим моделям, авторам пока не позволяют финансовые возможности. Поэтому были проведены подобные эксперименты, основная цель которых состояла в том, чтобы показать реальность развиваемого положения о создании двигателя, аналогичного реактивному, но с сохранением на летающем объекте рабочего вещества.
Объект m1 в проводимых экспериментах представлял собой две достаточно длинные платформы длиной 44 см и 70 см, соединенные между собой шарнирно (см. рисунок) и расположенные на общей третьей платформе. Соединяющий шарнир позволяет располагать две платформы под различными углами друг к другу По этим платформам может свободно кататься шар m2, скатываясь с одной платформы, моделируя выброс его из объекта m1 перемещаясь на другую платформу, и останавливаясь на ней, моделируя обратную приемку выброшенного шара на этот объект. Если не рассматривать приемку массы m2 на объект и разрешить скатывающемуся шару m2 вылететь из объекта, то последний получит движение в направлении, противоположном направлению движения шара и скорость этого движения определяется по классическим законам механики из закона сохранения количества движения.
В одной серии экспериментов общая платформа объекта m1 помещалась на трех шариках и могла перемещаться качением на этих шариках по специальным направляющим как на этой платформе так и на платформе-фундаменте, показывая воздействие массы m2 на объект m1 как при выбросе ее из объекта, так и при возвращении ее обратно. Размещение объекта m1 на трех шариках было призвано обеспечить наименьшее трение при качении объекта по фундаменту, что необходимо для лучшего моделирования движения масс m1, m2 в пространстве, где нет взаимодействия объекта с фундаментом. Вес массы m1 превышал вес массы m2 в три и более раз в различных экспериментах, описанных ниже. В этой серии экспериментов нужно было тщательно следить за горизонтальностью размещения платформы объекта и фундамента, чтобы не происходило движения объекта без какого-либо его закрепления ни в какую сторону до начала эксперимента. Результаты данных экспериментов должны дать ответ на вопрос, получается или не получается в четкой форме ожидаемое движение объекта после выброса из него массы m2 и остановки на нем этой выброшенной массы m2, т.е. после скатывания шара m2 с первой платформы и остановки его на второй платформе.
В другой серии экспериментов общая платформа объекта m1 размещалась еще на одной платформе, длиной 160 см, которая на концах подвешивалась к потолку на тонких проволочках, длиной 290 см, расположенных параллельно друг другу. Эта подвеска осуществляла маятниковую подвеску объекта m1 в пространстве. Размещение объекта на маятниковой подвеске было призвано снять возникший в первой серии экспериментов вопрос о влиянии силы трения качения объекта m1 на шариках на конечные результаты экспериментальных исследований. Во второй серии экспериментов трения качения не было. В первой серии экспериментов проводилось исследование существования движущей силы при выбросе массы m2 из объекта m1 с последующей ловлей этой массы на объекте. Выброс массы моделировался, как уже было сказано, следующим образом. Шар m2 размещался и закреплялся на одной из первых двух платформ объекта m1, расположенной под некоторым углом к другой платформе так, чтобы быть расположенным выше этой второй платформы. Затем шар освобождался и скатывался с первой платформы на вторую и этим действием моделировался выброс массы m2 из объекта. В результате весь объект m1 приходил в движение в направлении, противоположном направлению движения шара m2. Движение объекта в данном случае соответствовало законам классической механики. На второй платформе производилась остановка шара m2 на объекте различными способами.
Одним из этих способов остановка осуществлялась следующим образом. Вторая платформа размещалась под таким углом к горизонтальной плоскости, чтобы шар на этой платформе начинал подниматься вверх, расходовал часть кинетической энергии на изменение движения объекта, а часть на подъем по второй платформе. Затем шар плавно останавливался на второй платформе, когда его горизонтальная составляющая скорости сравнивалась со скоростью массы m1 и фиксировался в момент остановки. В этих экспериментах высота размещения шара на первой платформе подбиралась так, чтобы при остановке шара на второй платформе не происходило какого-либо удара с ней. Экспериментов данного рода было сделано достаточно много, менялись углы расположения платформ, менялась высота начального расположения шара m2, менялась масса объекта. Практически в каждом из этих экспериментов после остановки шара m2 и фиксации его в месте остановки объект менял первоначально полученное направление движения и приобретал некоторую небольшую скорость в направлении движения шара m2. Этот экспериментальный результат подтверждал правильность теоретических результатов, изложенных выше. На первых порах может показаться, что этот результат не подтверждение изложенных выше теоретических результатов, а следствие существование трения качения объекта на трех шариках, срабатывающего в выработке указанного движения. Для снятия возникшего сомнения авторы провели экспериментальные исследования, помещая объект m1 на маятниковой подвеске, а не на шариках. В этом случае трение качения отсутствует. Об этих экспериментах далее подробно будет сказано.
Другим способом остановки шара на второй платформе была остановка при помощи контактного удара шара о некоторое препятствие на этой платформе. Вторая платформа в этой серии экспериментов располагалась близко к горизонтальному положению. Для того чтобы обеспечить остановку шара после контактного взаимодействия шара и объекта, когда он при горизонтальном расположении платформы отскакивал, катился назад и этим затруднял восприятие эксперимента, эта платформа располагалась под небольшим отрицательным углом к горизонтальной плоскости. В этом случае шар уже не мог катиться назад после контактного удара, а останавливался около препятствия. Иначе при точном горизонтальном расположении платформы необходимо было делать захватывающее приспособления для фиксации шара у препятствия, что усложняло эксперимент.
Экспериментов данного рода было сделано также достаточно много и было выявлено следующее. Когда скорость шара мала и при достижении шаром препятствия, с которым происходил слабый упругий удар, то во всех экспериментах объект менял направление первоначального движения и начинал двигаться в направлении скорости массы m2. Этот экспериментальный результат подтверждает изложенный выше теоретический результат о существовании движущей силы без выброса массы m2 из объекта.
Но в данной серии экспериментов получился и следующий результат. Если скорость шара непосредственно перед ударом достаточно большая и удар не слабый, шар после удара останавливался, и объект тоже останавливался после такого удара. Можно было бы очень легко согласиться с подтверждением этим результатом классической механики, которая говорит, что после соударения двух тел, общее количество движения которых было равно нулю до соударения, после полностью неупругого соударения объединения система тел должна иметь нулевую скорость. Но тогда возникает вопрос, почему это не происходит при соударении масс m1, m2, когда скорость массы m2 мала. Забегая вперед, скажем, что в случае размещения объекта на маятниковой подвеске в данного рода экспериментах при остановке массы m2 на объекте при помощи упругого удара объект после этого удара менял скорость движения в направлении скорости движения массы m2 при любых скоростях соударения, а не только при малых.
Точного ответа на вопрос, почему останавливается объект после сильного соударения масс m1, m2, когда он — объект, расположен на трех шариках, пока нет. Возникает предположение, что в этом случае вступает в игру контактное взаимодействие в трех точках шариковых опор объекта и неподвижного фундамента. Об этом свидетельствуют результаты экспериментов, когда объект располагался на маятниковой подвеске и такого рода контакты объекта и фундамента отсутствовали. В этом случае объект не останавливался при сильных соударениях масс m1, m2, а приобретал даже более большую скорость в направлении скорости массы m2 по сравнению со скоростью объекта после более слабых ударов. Попутно отметим, что наличие трения качения не помогало в случае сильных контактных взаимодействий организовать движение в направлении движения шара, хотя должно было бы сделать это, потому что причин для несрабатывания этого явления не возникало.
Следующая серия экспериментов была проведена в случае, когда объект располагался на маятниковой подвеске. Как было сказано, такое расположение объекта было рассмотрено для того, чтобы выяснить влияние на результаты исследований трения качения, которое имеется при расположении объекта на трех шариках качения. В случае маятниковой подвески такое трение отсутствует и поэтому для достижения поставленной цели, практически, были повторены все эксперименты, проведенные ранее. Чтобы отличать эффекты маятникового движения от изучаемого здесь, длина маятниковой подвески сделана достаточно большой, порядка трех метров, по сравнению с размахом получаемых колебаний порядка десяти сантиметров в одну сторону от среднего положения. Основное внимание при наблюдении следует уделять движению объекта в начальный момент, когда маятниковые движения еще не начались в полную силу. Хотя в конечном итоге следует изучать все движение объекта.
В первой серии экспериментов изучалась ситуация, когда остановка выброшенной массы m2 осуществлялась без удара за счет расходования кинетической энергии ее на передачу массе m1 и на подъем на второй приемной платформе, расположенной наклонно вверх под некоторым углом к горизонтальной плоскости. Анализ конечного движения объекта с остановленной на нем массой m2 в данном случае несколько усложнялся, так как в итоге образовывается маятниковое качание объекта.
Проведем некоторый анализ по классической теории механики движение объекта на маятниковой подвеске, когда вначале он находился в неподвижном состоянии. Затем масса m2, расположенная на его первой платформе, на некоторой высоте относительно места соединения платформ после ее освобождения без приложения внешнего силового воздействия начинала скатываться, теряя высоту, приобретала некоторую скорость, а затем вкатывалась на вторую платформу, набирая высоту, останавливалась и фиксировалась в месте остановки также без приложения внешнего силового воздействия.
Согласно классической механике объект m1 после остановки массы m2 на нем должен также остановиться. К нему не прикладывались внешние силы, он находился в неподвижном состоянии до начала движения массы m2, т.е. скатывания шара его количество движение равнялось нуль и нулевым должно быть при остановке массы m2 на второй платформе. В реальном же эксперименте объект при остановке массы m2 приобрел существенное количество движения, продолжал двигаться в направлении скорости движения массы m , а в дальнейшем вступала в действие маятниковая система и объект с покоящейся на нем массой m2 начинал колебаться со значительной по величине амплитудой. Это говорит о том, что в итоге объект приобрел при остановке на нем массы m2 значительное количество движения и этот результат также свидетельствует в пользу положения о возможности создания движущей силы без выброса массы.
Было проведено достаточно много экспериментов подобного рода, менялась высота начального положения массы m2, менялись углы наклона платформ. Вывод из результатов этих экспериментов можно сформулировать следующим образом. Увеличение кинетической энергии массы m2 в момент перекатывания ее с первой платформы на вторую приводит к увеличению количества движения объекта m1 в момент остановки на нем массы m2. Это в конечном итоге подтверждает реальность рассматриваемой идеи создания двигателя без потери рабочего вещества.
Эти эксперименты также показали, что трение качения опорных шариков в аналогичных экспериментах, когда объект располагался на них, играли отрицательную роль в процессе передачи массой m2 кинетической энергии объекту при остановки ее на нем после выброса. Хотя в этих экспериментах на шариковых опорах объект получал движение в направлении скорости шара m2 после остановки его на объекте, это движение было существенно меньше, чем в экспериментах на маятниковой подвеске. Оказалось, что трение не помогает создавать движение объекту при остановке на нем выброшенной массы, как высказывали специалисты при ознакомлении с результатами экспериментов, а наоборот, оно мешает этому процессу.
Далее были проведены эксперименты при расположении объекта на маятниковой подвеске, когда остановка шара m2 осуществлялась при помощи упругого удара о препятствие на второй платформе. Здесь опять были повторены аналогичные эксперименты, выполненные в случае, когда объект располагался на трех шариках. Выводы из результатов этой серии экспериментов получились аналогичные, что и в предыдущем случае. Интересными были следующие эксперименты. Как было отмечено в экспериментах на шариках при остановке шара m2, когда он имел достаточно большую кинетическую энергию при вкатывании на вторую платформу, сильным ударом о препятствие объект m1 обычно останавливался, а при небольшой кинетической энергии шара, объект всегда после удара приобретал движение в направлении движения шара. В данных же экспериментах при расположении объекта на маятниковой подвеске подобного эффекта остановки объекта не наблюдалось. После остановки шара ударом о препятствие, объект всегда приобретал существенное по сравнению с экспериментами на шариках количество движения в направлении движения шара, и это количество было тем больше, чем больше была кинетическая энергия шара при вкатывании его на вторую платформу. Это также свидетельствует о том, что шариковые опоры при достаточно сильных ударах шара m2 оказывают большое сопротивление передаче энергии движения объекту.
Таким образом, при проведении экспериментов, когда объект располагается на трех шариках, не стоит сильно опасаться предположения, что конечное движение объекта образуется не передачей ему энергии движения шара, а наличием трения качения у шариков. Эксперименты на маятниковой подвеске четко показали, что движение объекта формируется передачей ему кинетической энергии от шара. Объект с остановленной на нем массой m2 после начального времени наблюдения начинает колебаться как маятник с достаточно большой амплитудой, т.е. получает значительное количество движения от остановившегося на нем шара.
Эта серия экспериментов также подтвердила вывод о правдоподобности идеи создания двигателя, аналогичного реактивному, но без потери объектом рабочего вещества. Еще раз отметим, что такой вывод с точки зрения классической механики представляется неверным, но это только на первый взгляд. При проведении вышеизложенного теоретического анализа за основу взято явление сохранения энергии, а этот классический прием и взят на вооружение в теории упругости и во многих других областях науки. Крамольного в таком подходе ничего нет. И эта основа привела к выводу о возможности создания указанного двигателя. Теперь и эксперименты подтвердили реальность идеи создания такого двигателя.
Объяснение явления получения движения объекта без приложения к нему внешних сил, которого в соответствии с классической механикой не должно быть, следующее. Общеизвестные уравнения гравитации и электромагнетизма совпадают с уравнениями упругой среды [4]. Уравнения эти проверены жизнью и поэтому являются правильными при современном уровне знаний. Тогда достаточно основательно можно считать, что пространство заполнено упругой средой, раз оно описывается уравнениями упругости. Ну а если так, то полученное движение образовано взаимодействием рассматриваемого объекта с данной средой и утопического в такой возможности уже ничего нет. Математически такое движение тел можно описать, исходя из уравнений гравитации и электромагнетизма и используя приемы теории упругости, разрабатываемые, например, для описания дислокации в упругих телах. Реально это достаточно большая самостоятельная и очень интересная научная тема. Упругая модель среды пространства, как уже отмечалось, дала человечеству выдающиеся результаты. Можно надеяться, что эта модель даст, и другие результаты науке и человечеству и пренебрегать такой возможностью не стоит. Предлагаемое исследование и является попыткой реализовать такую возможность. Эксперименты показывают, что попытка не безнадежная.
В заключение данного экспериментального исследования были проведены следующие эксперименты. Объект, как и выше, был помещен на три шарика и на нем были помещены один за другим вначале два, потом три, потом четыре шара. Эти шары помещены были на определенной высоте относительно точек контактной остановки их так, чтобы полученная ими скорость при скатывании приводила к несильным упругим ударам при остановке. Вначале освобождался один шар, после его остановки ударом о препятствие освобождался второй шар, после его остановки, освобождался третий шар, затем четвертый. Такими экспериментами моделировалась непрерывная работа двигателя.
В первом эксперименте после остановки первого шара на объекте этот объект приобретал небольшую скорость в направлении качения шара, после остановки второго шара скорость объекта значительно увеличивалась. Во втором эксперименте, когда было три шара, конечная скорость объекта увеличивалась еще больше. Ну и в третьем эксперименте, когда по очереди включались в работу четыре шара, конечная скорость объекта еще более увеличивалась и становилась существенной по величине. Такое наивное моделирование работы двигателя, тем не менее, серьезно подтвердило реальность идеи создания двигателя без потери рабочего вещества.
Эти эксперименты ответили также на вопрос, не является ли основой создания движущей силы трение качения на трех шариках. Это сомнение возникло при эксперименте с одним шаром m2. В этом случае на начальном этапе эксперимента, когда шар моделировал реактивное выбрасывание массы m2 скатыванием с первой платформы, объект m1 приобретал движение в направлении, противоположном движению шара. В этом случае сила трения действовала в направлении движения шара m2 и могла участвовать в создании конечного движения объекта в этом же направлении. В эксперименте с двумя, тремя и четырьмя шарами объект при включении в работу второго шара уже имеет приобретенную скорость в направлении движения освобожденного первого шара и сила трения с этого момента или существенно уменьшается, или даже действует в направлении, противоположном направлению движения второго и следующих шаров и не может уже участвовать в создании движения в сторону движения «выбрасываемых» шаров. Следовательно, вопрос о том, что создателем движения объекта является сила трения трех опорных шаров, снимается с рассмотрения. Таким образом, выполненное экспериментальное исследование подтверждает идею создания движущей силы при помощи передачи объекту кинетической энергии выбрасываемой массы путем соответствующего останавливания ее на объекте.
Литература
1. Иванов С. Д., Чернышев Г. Н. Устранение противоречий теории упругости и эксперимента посредством учета деформации расширения-сжатия вещества упругого тела//Проблемы машиностроения и автоматизации. Международный журнал, 2003, №4.
2. Сахаров А.Д. Вакуумные квантовые флуктуации в искривленном пространстве и теория гравитации // Доклады Академии Наук, 1967, т. 177. С. 70-71.
3. Misher Charlts W., Thorne Kip S., Wheeler John A., Gravitation. San Francisco,:W.H. Freeman and Company, 1973. (Рус. пер. Мизнер Ч., Торн К., Уиллер Дж. Гравитация. В трех томах. М.: Мир, 1977. т. 1, 471с, т.2, 525 с., т.3, 510с.)
4. Чернышев Г. Н. Упругость, гравитация, электродинамика. М.: Наука, 2003. 144с.
5. Яворский Б. М., Детлаф А. А. Справочник по физике. М.: Наука, 1965. 847с.
|
